דער פּרינציפּ פֿון דער אויל ליניע
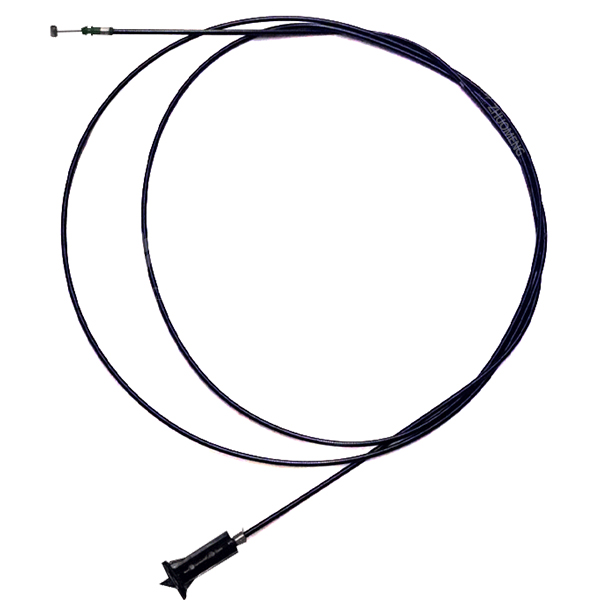
דער טראדיציאנעלער ציען-דראָט גאַז-שטראָגל איז פארבונדן צום גאַז-פּעדאַל דורך איין עק פון אַ שטאָל דראָט און צום גאַז-ווענטיל אויף דעם אַנדערן עק. איר טראַנסמיסיע פאַרהעלטעניש איז 1:1, דאָס הייסט, וויפיל מיר ניצן אונדזערע פֿיס צו טרעטן אויף דעם גאַז-עפענונג ווינקל איז וויפיל, אָבער אין פילע פאַלן זאָל דער ווענטיל נישט עפענען זיך אַזאַ גרויסן ווינקל, אַזוי דעם סעזאָן איז דער ווענטיל-עפענונג ווינקל נישט דאַווקע דער מערסט וויסנשאַפטלעכער, כאָטש דער וועג איז זייער דירעקט, אָבער די קאָנטראָל גענויקייט איז זייער שוואַך. און עלעקטראָניש גאַז-שטראָגל איז דורך אַ קאַבל אָדער דראָט כאַרנעס צו קאָנטראָלירן די גאַז-עפענונג, פון דער ייבערפלאַך איז צו פאַרבייַטן די טראדיציאנעלע גאַז-ליניע מיט אַ קאַבל, אָבער אין עסענץ איז עס נישט בלויז אַ פּשוטע ענדערונג פון פֿאַרבינדונג, נאָר קען דערגרייכן אַן אויטאָמאַטישע קאָנטראָל פונקציע פון דער גאַנצער פאָרמיטל'ס מאַכט-אויסגאַבע.
ווען דער דרייווער דארף גיך געבן דעם גזאל, וועט דער פּעדאַל פּאָזיציע סענסאָר באַמערקן דעם סיגנאַל דורך דעם קאַבל צום ECU, נאָך אַנאַליז, משפט, און ארויסגעבן אַ באַפֿעל צום דרייוו מאָטאָר, און דער דרייוו מאָטאָר קאָנטראָלירט די עפענונג פון דעם גאַז-שטראָל, כּדי צו סטרויערן דעם פלוס פון ברענשטאָף-מישונג. ביי אַ גרויסער לאַסט, איז די עפענונג פון דעם גאַז-שטראָל גרעסער, און גייט אַרײַן אין דעם צילינדער מיט אַ גרעסערן ברענשטאָף-מישונג. אויב מען ניצט אַ ציען-דראָט גאַז-שטראָל, קען מען זיך נאָר פֿאַרלאָזן אויף דעם פֿוס צו טרעטן אויף דעם גאַז-שטראָל פּעדאַל טיפֿקייט צו קאָנטראָלירן די עפענונג פון דעם גאַז-שטראָל, איז שווער צו סטרויערן דעם ווינקל פון דעם גאַז-עפֿענונג צו דערגרייכן דעם טעאָרעטישן לופֿט-ברענשטאָף פאַרהעלטעניש צושטאַנד. דער עלעקטראָנישער גאַז-שטראָל קען דורך דעם ECU סענסאָר אַנאַליזירן, פאַרגלײַכן און ארויסגעבן אינסטרוקציעס צום גאַז-שטראָל אַקטואַטאָר, און שטעלן דעם גאַז-שטראָל אין דער בעסטער פּאָזיציע. כּדי צו דערגרייכן פֿאַרשידענע לאַסט און אַרבעטס-באַדינגונגען, קען מען זײַן נאָענט צום טעאָרעטישן לופֿט-ברענשטאָף פאַרהעלטעניש פון 14.7:1, כּדי דער ברענשטאָף זאָל זײַן פֿולשטענדיק פֿאַרברענט.
די עלעקטראָנישע גאַז קאָנטראָל סיסטעם איז דער הויפּט צוזאַמענגעשטעלט פון גאַז פּעדאַל, פּעדאַל דיספּלייסמאַנט סענסאָר, ECU (עלעקטראָניש קאָנטראָל יוניט), דאַטן באַס, סערוואָ מאָטאָר און גאַז אַקטואַטאָר. דער דיספּלייסמאַנט סענסאָר איז אינסטאַלירט אין די גאַז פּעדאַל צו מאָניטאָר די פּאָזיציע פון גאַז פּעדאַל אין קיין צייט. ווען די ענדערונג פון גאַז פּעדאַל הייך איז דעטעקטעד, די אינפֿאָרמאַציע וועט געשיקט ווערן צו די ECU באַלד. די ECU וועט קאַלקולירן די אינפֿאָרמאַציע און די דאַטן אינפֿאָרמאַציע פון אנדערע סיסטעמען, און קאַלקולירן אַ קאָנטראָל סיגנאַל, וואָס וועט געשיקט ווערן צו די סערוואָ מאָטאָר רעליי דורך די ליניע. דער סערוואָ מאָטאָר טרייַבט די גאַז אַקטואַטאָר, און די דאַטן באַס איז פאַראַנטוואָרטלעך פֿאַר די קאָמוניקאַציע צווישן די סיסטעם ECU און אנדערע ECU. זינט די גאַז איז אַדזשאַסטיד דורך די ECU, עלעקטראָניש גאַז סיסטעמען קענען זיין קאַנפיגיערד מיט פאַרשידענע פֿעיִקייטן צו פֿאַרבעסערן דרייווינג זיכערקייַט און טרייסט, די מערסט פּראָסט פון וואָס זענען ASR (טראַקשאַן קאָנטראָל) און גיכקייַט קאָנטראָל (קרוז קאָנטראָל).